Roboty kooperujące, czyli roboty pracujące ramię w ramię z ludźmi, stanowią coraz ważniejszy element nowoczesnych rozwiązań przemysłowych.
Zapewniają one większą efektywność produkcji, elastyczność procesów oraz poprawę jakości wykonywanych zadań. Jednak kluczowym aspektem współpracy między robotami a ludźmi jest zapewnienie bezpieczeństwa operatorów.
Tutaj właśnie pojawia się norma ISO/TS 15066, która definiuje wytyczne dotyczące oceny ryzyka i bezpiecznej interakcji człowieka z robotem.
Czym jest norma ISO/TS 15066?
ISO/TS 15066 to techniczna specyfikacja międzynarodowej organizacji ISO (International Organization for Standardization), która została opracowana z myślą o bezpiecznej współpracy operatora z robotem kooperującym. Norma ta stanowi wsparcie dla projektantów, producentów oraz użytkowników robotów, którzy pragną zagwarantować bezpieczeństwo i ochronę zdrowia pracowników.
Główne zasady normy ISO/TS 15066
- Bezpieczne siły i ciśnienie:
Norma precyzuje, jakie siły i ciśnienie może być wywierane przez robota na operatora podczas wspólnej pracy. Ograniczenie tych parametrów minimalizuje ryzyko poważnych obrażeń. - Strefy bezpieczne:
Norma definiuje tzw. strefy bezpieczne wokół robota, które są monitorowane i kontrolowane. Jeśli operator znajdzie się w strefie zagrożenia, robot powinien reagować w odpowiedni sposób, np. zwalniać lub zatrzymywać działanie. - Klasyfikacja rodzajów kontaktu:
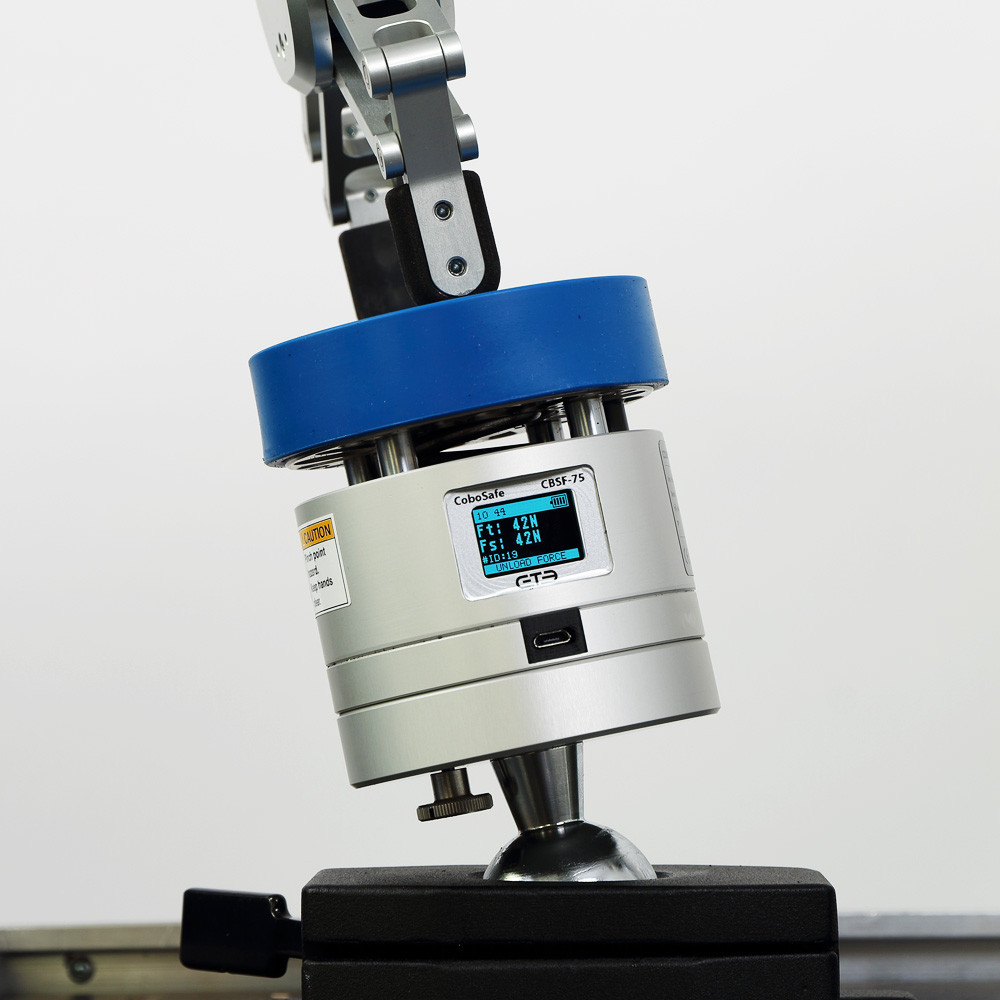
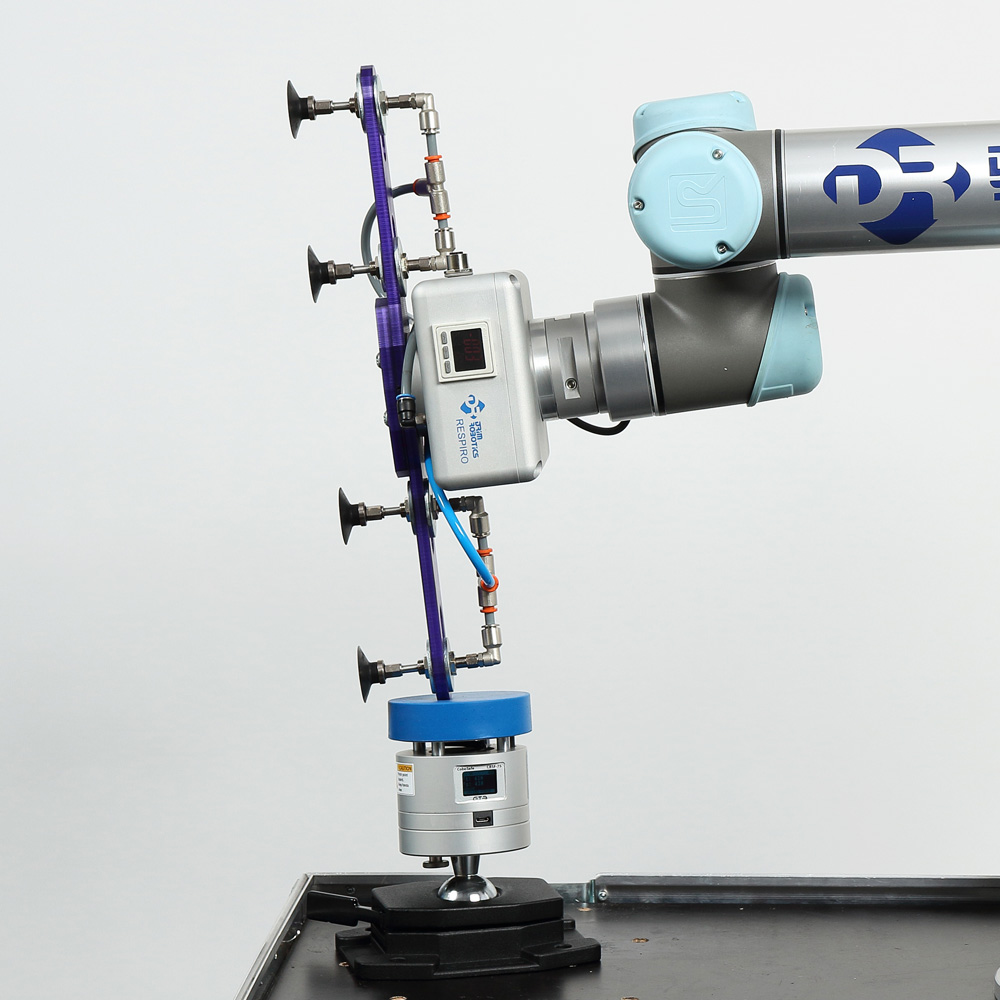
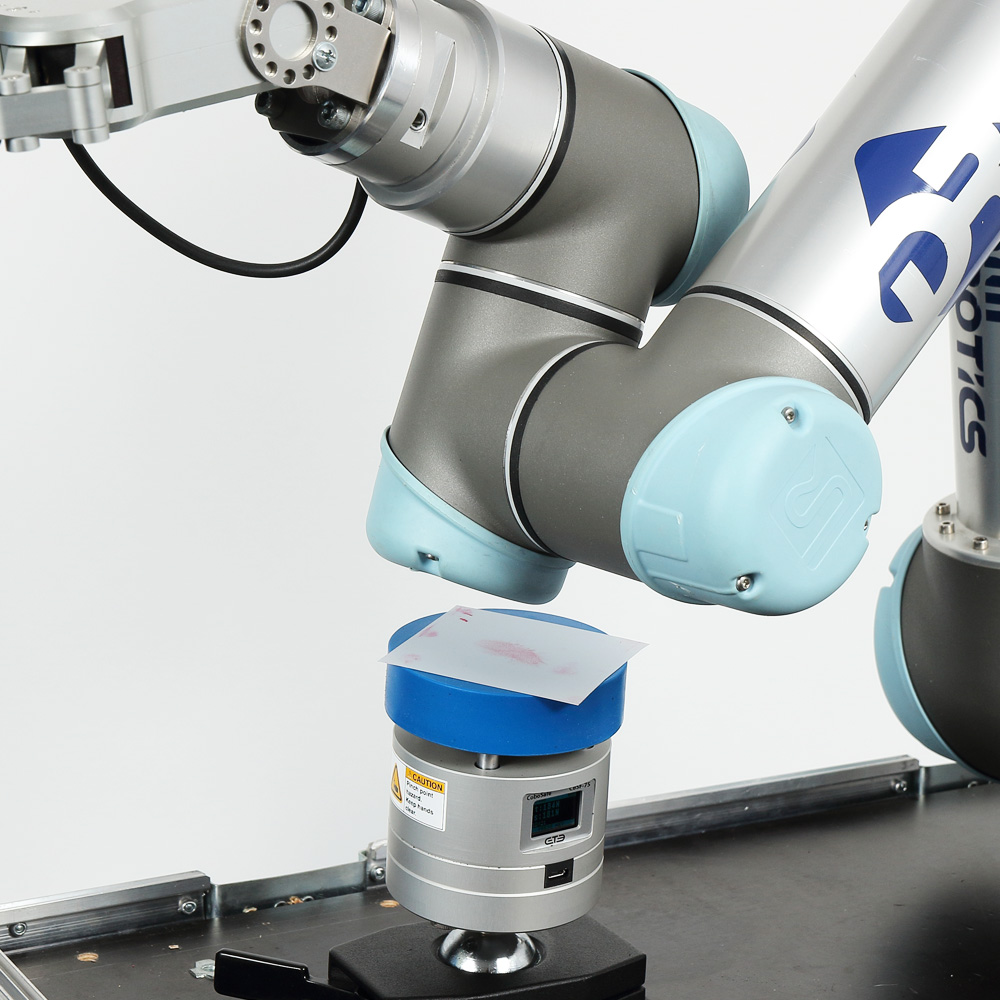
Norma określa kontakt cobota z operatotem na przejściowy (transicient contact) odpowiadający uderzeniu oraz taki, który odpowiada potencjalnemu zgnieceniu (semi static) - Pomiar sił kontaktowych:
Norma opisuje metody pomiaru sił, które występują podczas kontaktu pomiędzy robotem a człowiekiem, umożliwiając dokładne analizy i poprawki w celu zapewnienia większego bezpieczeństwa.
Oferujemy:
- Konsultacje i szkolenia:
Pomagamy w zrozumieniu wymagań normy ISO/TS 15066 a co za tym idzie budowy bezpiecznego stanowiska z robotem kooperującym. - Ocena ryzyka:
Przeprowadzamy ocenę ryzyka, aby zidentyfikować potencjalne ryzyka dla operatora i minimalizować je. - Pomiary i analizy:
Dokonujemy pomiarów sił kontaktowych i analizujemy dane, aby zapewnić, że roboty pracują w sposób bezpieczny i zgodny z normą. - Projektowanie bezpiecznych aplikacji:
Wspieramy w projektowaniu aplikacji, które uwzględniają wytyczne ISO/TS 15066 i zapewniają bezpieczną współpracę robotów z ludźmi.
Jak możemy Ci pomóc zgodnie z normą ISO/TS 15066?
Nasz zespół specjalistów posiada wiedzę i doświadczenie w zakresie bezpieczeństwa robotów kooperujących oraz wdrożeniach zgodnych z normą ISO/TS 15066.